PID(比例-积分-微分)控制器

成比例的
的成比例的项使当前误差信号与增益(Kp)相乘。结果将是输出信号。
所以输出信号= Kp * Error_Signal
积分
的积分term使当前误差信号的值和持续时间乘以一个增益(Ki)。
结果就是输出信号。
那么输出信号=
Ki -是积分增益
t是瞬时时间
e(t) -是误差信号
信号的积分是信号从开始计数到停止计数的所有瞬时值的总和。
积分项(当添加到比例项)加速过程向设定值的运动,并消除残留的稳态误差,发生与仅比例控制器。
导数
的导数项使误差信号的变化率与增益(Kp)相乘。结果就是输出信号的值。
那么输出信号=
-其中Kd为导数增益
-e(t)是误差信号。
导数项减缓了控制器输出的变化率,这种效果在接近控制器设定值时最为明显。
PID控制系统
这是a的框图PID控制系统。
包括:
pid控制器
动线/工厂
反馈
定位点
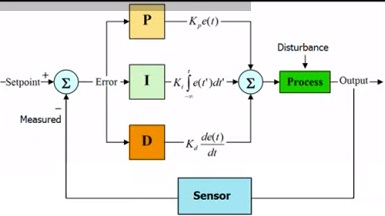
设定值是我们希望流程达到的值。
输出必须等于设定值,否则错误信号将不为零。
误差信号为[测量设定值]
这3个增益[P,I和D]将总和为输出1个信号,将得到输出等于设定值
过程是系统的工厂/模型。例子——电动机
系统受到干扰。例子-电机轴的摩擦。

从测量值中减去设定值就产生了误差。
误差只是简单地乘以一个,两个或所有计算的P,I和D动作。
然后,产生的“error x control action”被加在一起并发送到控制器输出。